Kor
Eng
About us
Technology
Product
Education
Customer
About us
CEO 인사말
회사 소개
경영철학
조직체계
연혁
Contact us
Technology
로봇자율주행
UWB 측위
UV 방역
인공지능
Produet
로봇
드론
Education
초경량비행장치조종자
지도조종자
촬영
Pix4D
블로그바로가기
Customer
공지사항
자료실
전자앨범
CEO인사말
회사개요
경영철학
조직체계
연혁
Contact us
로봇자율주행
UWB 측위
UV 방역
인공지능
로봇
드론
초경량비행장치
지도조종자
촬영
Pix4D
공지사항
자료실
전자앨범
라이트비욘드드론즈㈜ 로봇자율주행
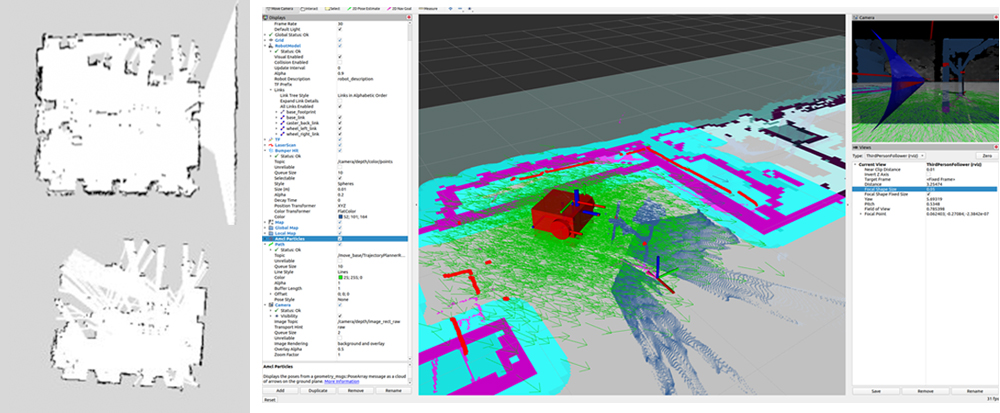
로봇자율주행
로봇자율주행
UWB 측위
UV 방역
인공지능
로봇자율주행
맵핑 기술
· LIDAR와 Camera 정보 이용 동시적 위치추정 및 지도작성기술(SLAM; Simultaneous localization and mapping) 기반 맵핑 기술
· LIDAR 정보와 후 보정 과정을 통한 점유격자지도(OGM) 작성 기술
· Machine Learning 을 이용한 OGM 수정 기술
· OGM을 사용자 친숙형 지도로 변환하는 기술
센서 보정기술
· 로봇 바퀴의 회전을 감지하여 이동거리와 자세 정보를 제공하는 오도메트리 보정 기술
· UWB 기술 등을 이용한 실시간 보정기술
Landmark 정합을 통한 정밀 Localization 기술
· 영상 처리를 통한 특이점 검출과 이를 통한 로봇 pose 및 위치 추정 기술
· 유무선 Tag, 시각 지표를 이용한 pose 및 위치 추정 기술
다중 센서를 이용한 주변 장애물 인식 기술
· IR, Laser, 초음파 방식의 TOF 센서를 이용한 장애물 확인 기술
· Stereo Camera를 이용한 장애물 인식 기술
DWA 기반 장애물 회피 경로설정 기술
· 머신러닝 기술을 통해 작성한 동적 장애물 식별 모델과 점유 공간 클러스터링 모델을 사용하는 장애물 식별 기술
· 최적화된 DWA 알고리즘을 사용한 장애물 회피 경로 탐색 기술
임무 경로 설정 기술
· 임무수행을 위한 다중 목적지 설정 및 목적지 우선 순위 결정 기술
· 최적 운영을 위한 목적지 및 경유지점 모두를 지나는 경로 탐색 및 계획 기술
경로 계획법
· 맵 데이터와 장애물 센서 값을 기반으로 계산한 Potential Field 방식의 코스트 맵 작성하는 기술
· 고정 구조에 의한 장애물 위치, 동적 장애물 발생 빈도, 임무 목적 등을 고려한 임무 중심 코스트 맵 작성 기술
· 출발점과 목적 지점 사이의 최단 경로를 탐색하는 A* 알고리즘 등을 사용한 전역 경로 설정 기술